チューリッヒ大学のロボティクスと知覚グループが開発した自律型AI搭載ドローンのスイフト(Swift)は、人間が操縦するドローンとの直接対決に勝利する能力を持つことが明らかになりました。今回の知見は、移動ロボット工学と人工知能にとって画期的な成果であり、他のAI物理システム(自動運転車や航空機、ロボットなど)への「ハイブリッド学習」を用いたソリューションの適用を促すことになるかもしれません。この研究成果の論文がNatureに掲載されています。
- Champion-level drone racing using deep reinforcement learning(8/30 Nature)
- 技術:ドローンレースのチャンピオンと肩を並べたAIシステム(8/31 Nature)
- Drone Racing(UZH Robotics and Perception Group)
これまでに深層強化学習システムは、さまざまなゲーム(囲碁、チェス、ビデオゲーム、スタークラフト、グランツーリスモなど)で人間を打ち負かしてきました。しかし、こうした勝利の大部分はシミュレーションやボードゲームの環境に限られていました。
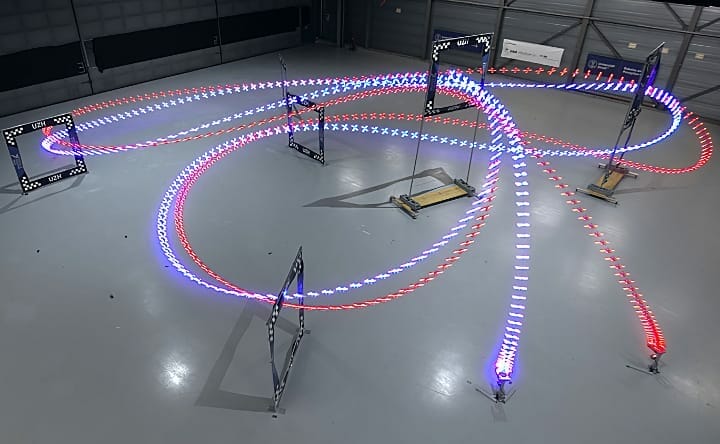
FPV(一人称視点)ドローンレースは、プロの競技者が操縦する高速ドローンが3Dレースコースに設定されたゲートを通過しながら飛行するレースで、パイロットはドローンに搭載されたカメラからストリーミング配信された映像によって、ドローンの視点から見た周囲環境を瞬時に把握します。自律飛行型ドローンが、プロのレースパイロット・レベルに到達することは難しいとされていました。
加速すると時速80マイル(約128km)にも達する物理的限界域で飛行しながら、本体に搭載されたセンサーだけを使って、レースコースにおける飛行速度と位置情報を高速に推定する必要があるためです。
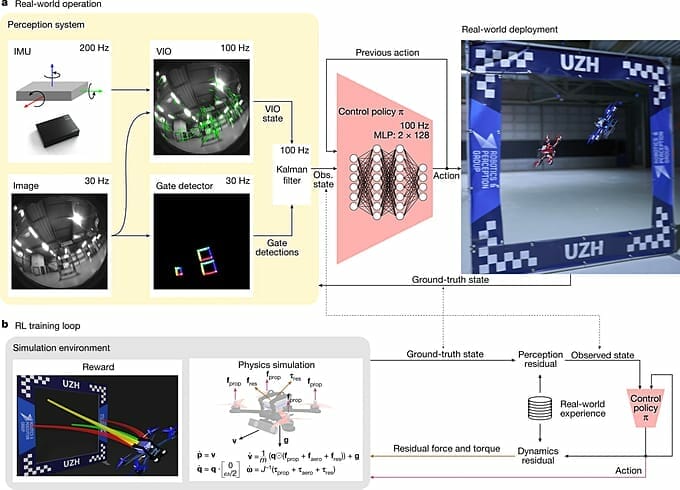
Robotics and Perception Group, University of Zurichの、Elia Kaufmannらは、現実のドローンレースで、人間の世界チャンピオンと同等の成績を収めることができる自律型AI搭載ドローン(The Swift system)を開発しました。このAIシステムは、シミュレーションによる深層強化学習と現実の周囲環境から収集されたデータを併用(ハイブリッド学習)しています。
対戦相手となる3名のチャンピオンたちは、コースの確認とトレーニングに1週間をかけています。同時にスイフトもトレーニングを行ない、コースをシミュレートしたデジタル環境と外部データの「ハイブリッド学習」を実施しています。自律型AI搭載ドローンのスイフトは、深層強化学習によって周回を重ねるごとに安定し、コースを回る際により小回りがきいていくように見えます。よりタイトになっていく旋回で、ラップタイムをコンマ数秒ずつ繰り返し短縮し、最終的にAIドローンがレースで優位になっていきます。
スイフトは、3人のパイロットとのレースで2勝以上を収めて、合計25戦15勝の戦績を残し、人間のパイロットの最高タイムを0.5秒上回るコース記録を樹立しました。対戦したのは、Alex Vanover氏、Thomas Bitmatta氏、Marvin Schaepper氏の3名。彼らはそれぞれ過去にドローンレースで優勝したチャンピオンたちです。
- ドローンレース(Google検索)