ハーバード大学の工学・応用科学スクール(SEAS)と中国の北京航空航天大学の研究者チームは、さまざまな形状、大きさの物体に適応して掴んだり、握ったり、持ち上げたり、移動させたりできる「吸盤」を持った柔軟なロボット触手を開発しました。研究開発は Festoと共同で市販用プロトタイプの製作段階に入っています。
- The Tentacle Bot(2/27 seas.harvard.edu)
- TentacleGripper(pdf / festo.com)
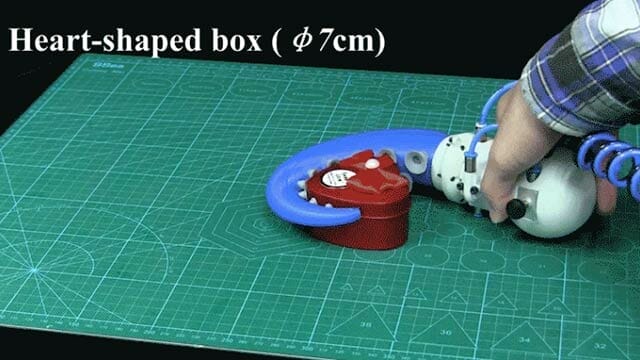
ソフトロボット触手は、さまざまなものを掴んだり、握ったり、持ち上げたりできます。2個のバルブを使用して、腕を曲げる機能の制御と吸盤の作動を行います。ハーバード大学は、このロボット触手がクルミからバランスボールまで、さまざまなものを掴む様子を映したYouTube動画を公開しました。

「通常なら複数のグリッパーが必要とされる場面でも、グリッパー1つでさまざまなものが掴める」とハーバード大学の博士課程を最近修了したAugust Domel氏は述べています。同氏は Soft Roboticsで発表されたロボットに関する論文の共同筆頭著者です。
ソフトロボットは柔軟性があるため、人との協働が必要な場面での利用に大きな期待が持てるそうです。「ぶつかった場合でもこれら(触手)は害がなく、従来の工場用ロボットと違って労働者から保護する必要がありません」 Festoのバイオニック学習ネットワークでは、生物や自然を調べて、そこから学んでいます。ロボット開発にとってタコは魅力的な生物です(^^)
- Bionic Learning Network(festo.com)